
Aussi appeler robot idiot, drawbot....

Difficulté
Technique
Durée
2 heure(s)
Disciplines scientifiques
Electricité
Youtube
- Matériel et outils
Moteur électrique 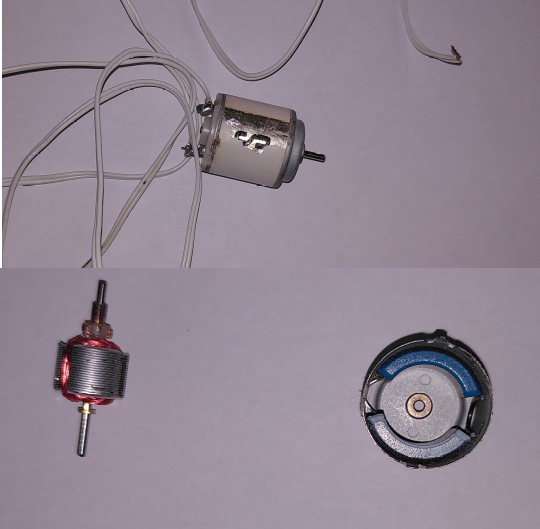

Les moteurs électriques sont des machines dites à courant continue.
En fonctionnement moteur, l'énergie électrique est transformée en énergie mécanique.En fonctionnement générateur, l'énergie mécanique est transformée en énergie électrique (elle peut se comporter comme un frein). Dans ce cas elle est aussi appelée dynamo.
Pile 9V 

Pile rechargeable Varta 200mAh, 9V, rectangulaire 2,65 x 4,85 x 1,75 cm
Câble Dupont 

Les câbles de connexion servent à créer rapidement des liaisons électriques sur des platines de prototypage sans avoir besoin de faire des soudures.
Gobelet
Erreur lors de la création de la miniature : convert: unable to extend cache `/var/www/dokitfarm/sites/Wikidebrouillard/images/2/24/Item-Gobelet_DSCN2651.JPG': File too large @ error/cache.c/OpenPixelCache/4006. convert: no images defined `/tmp/transform_c0be2383e7e9.jpg' @ error/convert.c/ConvertImageCommand/3258. Error code: 1
Récipient pour boire, plat (sans pied), de forme arrondie.
Interrupteur à bascule 

Pour ouvrir ou fermer un circuit électrique.
Colle 

Colle
Scotch 

Scotch transparent
Ciseaux 

Un paire de ciseaux est un outil comportant deux lames mobiles articulées qui glissent l'une sur l'autre pour trancher les matériaux minces.
Étape 1 - Rassembler le matériel
Pour le robot de base, il nous faut quelques composants. La plupart peuvent se dénicher sur des déchets éléctroniques. C'est même plutôt recomandable dans la démarche globale ;)
_ Un moteur electrique. On peut en trouver dans une brosse à dent electrique, un lecteur cd, une manette de jeu vidéo qui vibre...
- Un boitier de pile (et donc des piles) ou une pile 9 V. On peut utiliser un boitier de piles de guirlande de noel (coût 2€), qui en plus contient un interrupteur.
- Un interrupteur, qui peut aussi se dénicher sur des objets electroniques.
- Des feutres ou autre type de "jambes"
- Un gobelet (plutôt rigide)
- Un domino d'éléctricien, un bouchon de liège...quelque chose qui va déséquilibrer le robot.

Étape 2 - Rassembler les outils
Le fer à souder et le pistocolle peuvent être deux alliés de poids pour cette fabrication. Mais on peut s'en passer. La fabrication sera plus rapide, mais peut-être moins durable, et moins prétexte à apprendre.
Mode facile
- Scotch ( gaffeur, electricien, quelque chose qui colle vraiment)
- ciseaux et pinces ( pour couper, voir dénudé des cables...)
Mode technique
Les outils sus-nommées et....
=> Fer à souder ( ainsi que l'étain et les protections)
=> Pistolet à colle (ainsi que des batons de colles)



Étape 3 - Le circuit
Il s'agit d'un circuit comprennant 3 composants.
Le moteur / La pile / L'interrupteur. Le tout forme une belle boucle, que l'interrupteur ferme ou ouvre.
Une fois denudé, les cables peuvent être reliés:
-En melant les fils de cuivres, puis en scotchant.
-En soudant les cables ensembles (puis scother pour proteger les soudures).
-Avec des dominos d'electriciens.

Étape 4 - Le corps
Il est possible de faire tout type de corps. L'important étant que le tout soit équilibré, et que circuit puisse se fixer dessus.

Étape 5 - Le robot de base
Le robot de base, c'est donc ce circuit fixé sur ce corps (Gobelet + feutre). Il est possible d'en faire de toute sorte, et des très rigolos.




Comment ça marche ?
Observations : que voit-on ?
Le robot danse, dessine de manière ératique. Mais c'est beau.
Mise en garde : qu'est-ce qui pourrait faire rater l'expérience ?
- Court-circuits
- Les vibrations décollent les composants
- Les feutres sont mal ajustés, et le robot n'est pas stable
Explications
Le poids asymétrique sur le moteur, reproduit le fonctionnement d'un vibreur de telephone ou d'une manette de jeu.
Le robot bouge par vibration, bêtement :)
Applications : dans la vie de tous les jours
Votre vibreur de manette ou de telephone fonctionne sur le même principe, un moteur et un poid asymétrique.
Un robot est un assemblage de 3 composantes : Mecanique, electronique et programmation. Ici notre programmation se limite à Allumé / Eteint. Plutôt idiot.
Éléments pédagogiques
Objectifs pédagogiques
- Mener un projet technique
- S'approprier des outils
Pistes pour animer l'expérience
-
Dernière modification 11/10/2022 par user:ZAB.
Published