| Ligne 1 : | Ligne 1 : | ||
| − | {{ | + | {{Tuto Details |
| − | |Main_Picture= | + | |Main_Picture=Comprendre_les_r_sistances_de_pull-up_et_pull-down_pullupg.jpg |
| − | | | + | |Licences=Attribution (CC-BY) |
| − | |Description= | + | |Description=Les résistances de pull-up et pull-down (on dit résitance de tirance en français) sont utilisées pour fixer clairement un état électrique. |
| − | | | + | |Disciplines scientifiques=Arduino, Computing, Electricity |
| − | | | + | |Difficulty=Easy |
| − | | | + | |Duration=30 |
| − | + | |Duration-type=minute(s) | |
| + | |Tags=pullup, pulldown, pull-up, pull-down, résistance, smog, brouillard électromagnétique | ||
| + | }} | ||
| + | {{Introduction | ||
| + | |Introduction=Une résistance de pull-up "tire" le niveau électrique vers le haut, elle est donc reliée à la tension de votre montage (au +5V ou +3V3 suivant la carte électronique que vous utilisez). | ||
| − | === | + | Une résistance de pull-down "tire" le niveau électrique vers le bas, elle est donc reliée à la masse (GND) de votre carte. |
| + | }} | ||
| + | {{Materials | ||
| + | |ItemList={{ItemList | ||
| + | |Item=Bouton poussoir | ||
| + | }}{{ItemList | ||
| + | |Item=Arduino Uno | ||
| + | }}{{ItemList | ||
| + | |Item=Cable Dupont | ||
| + | }}{{ItemList | ||
| + | |Item=Résistance | ||
| + | }} | ||
| + | |Tuto_Attachments={{Tuto Attachments | ||
| + | |Attachment=Comprendre_les_r_sistances_de_pull-up_et_pull-down_resistancePULLUPwikideb.ino | ||
| + | }}{{Tuto Attachments | ||
| + | |Attachment=Comprendre_les_r_sistances_de_pull-up_et_pull-down_resistancePULLUP-2wikideb.ino | ||
| + | }} | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=Faisons des essais sans résistance de pull-up | ||
| + | |Step_Content=On réalise le montage comme sur le schéma ou la photo. | ||
| − | + | On charge le premier programme sur l'Arduino. | |
| − | |||
| − | |||
| − | |||
| − | + | On ouvre le moniteur série. | |
| − | |||
| − | |||
| − | |||
| − | + | Il ressort que moniteur série monteur un résultat qui n'est pas satisfaisant : | |
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | === | + | * L'état est fluctuant. |
| − | + | * Parfois après un appuis, l'état reste haut longtemps après qu'on ait relaché le bouton. | |
| + | * Le comportement est imprévisible. | ||
| + | |Step_Picture_00=Comprendre_les_r_sistances_de_pull-up_et_pull-down_poussoir.jpg | ||
| + | |Step_Picture_01=Comprendre_les_r_sistances_de_pull-up_et_pull-down_resistancePULLUP_bb.jpg | ||
| + | |Step_Picture_02=Comprendre_les_r_sistances_de_pull-up_et_pull-down_Capture_d_e_cran_2020-12-12_a_16.45.17.png | ||
| + | |Step_Picture_02_annotation={"version":"3.5.0","objects":[{"type":"image","version":"3.5.0","originX":"left","originY":"top","left":0,"top":0.08,"width":2086,"height":1776,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":0.29,"scaleY":0.29,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://www.wikidebrouillard.org/images/b/bc/Comprendre_les_r_sistances_de_pull-up_et_pull-down_Capture_d_e_cran_2020-12-12_a_16.45.17.png","filters":[]},{"type":"wfarrow2line","version":"3.5.0","originX":"center","originY":"center","left":515,"top":99,"width":56,"height":84,"fill":"rgba(255,0,0,0)","stroke":"#FF0000","strokeWidth":4,"strokeDashArray":null,"strokeLineCap":"round","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"x1":-28,"x2":28,"y1":42,"y2":-42,"x2a":23.562398430198165,"y2a":-20.921392543441293,"x2b":10.249593720792667,"y2b":-29.796595683044963},{"type":"wfarrow2circle","version":"3.5.0","originX":"center","originY":"center","left":487,"top":141,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586},{"type":"wfarrow2circle","version":"3.5.0","originX":"center","originY":"center","left":543,"top":57,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586}],"height":511,"width":600} | ||
| + | |Step_Picture_03=Comprendre_les_r_sistances_de_pull-up_et_pull-down_Capture_d_e_cran_2020-12-12_a_16.19.31.png | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=Faisons des essais avec résistance de pull-up | ||
| + | |Step_Content=On réalise le montage comme sur le schéma ou la photo. | ||
| − | + | On charge le premier programme sur l'Arduino | |
| − | |||
| − | |||
| − | |||
| − | |||
| − | + | On ouvre le moniteur série. | |
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| + | Le résultat est mieux ! Les état sont clairs ! | ||
| + | |Step_Picture_00=Comprendre_les_r_sistances_de_pull-up_et_pull-down_pullup.jpg | ||
| + | |Step_Picture_01=Comprendre_les_r_sistances_de_pull-up_et_pull-down_resistancePULLUP1_bb.jpg | ||
| + | |Step_Picture_02=Comprendre_les_r_sistances_de_pull-up_et_pull-down_Capture_d_e_cran_2020-12-12_a_16.18.56.png | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=Il parait qu'il y a des résistance de pull-up interne ? | ||
| + | |Step_Content=Oui l'Arduino possède une résistance de pull-up interne à chaque broche numérique (c'est le cas d'autres carte comme le [[Item:D1 mini|D1 mini]]). | ||
| + | |||
| + | |||
| + | Elle s'active dans le "setup" avec la fonction INPUT_PULLUP | ||
| + | <br /><syntaxhighlight lang="arduino"> | ||
void setup() { | void setup() { | ||
| − | + | pinMode(brocheBouton, INPUT_PULLUP); | |
} | } | ||
| + | </syntaxhighlight><br /> | ||
| + | |Step_Picture_00=Comprendre_les_r_sistances_de_pull-up_et_pull-down_resistancePULLUP-Interne_bb.jpg | ||
| + | }} | ||
| + | {{Notes | ||
| + | |Explanations=Nous sommes entourés d'ondes électromagnétiques. Les ondes de la transmission de la radio, de la télé, etc. le courant électrique aussi émet des ondes électromagnétiques. | ||
| + | |||
| + | Ces ondes créent de l'électricité dans les broches des composants électroniques. | ||
| − | + | C'est pour cela qu'une broche connectée à rien, n'est pas forcément à l'état 0. | |
| − | + | ||
| − | + | ||
| − | + | Une résistance de pull-up fixe l'état à HIGH (état haut). | |
| + | |||
| + | Une résistance de pull-down fixe l'état à LOW (état BAS). | ||
| + | |Applications=Pour des raisons matérielles que je n'ai pas vraiment comprises, on utilise les résistance de pull-up plutôt que des résistances de pull-down | ||
}} | }} | ||
{{Tuto Status | {{Tuto Status | ||
|Complete=Published | |Complete=Published | ||
}} | }} | ||
Version du 12 décembre 2020 à 18:13
Les résistances de pull-up et pull-down (on dit résitance de tirance en français) sont utilisées pour fixer clairement un état électrique.


Difficulté
Facile
Durée
30 minute(s)
Disciplines scientifiques
Arduino, Informatique, Electricité
Introduction
Une résistance de pull-up "tire" le niveau électrique vers le haut, elle est donc reliée à la tension de votre montage (au +5V ou +3V3 suivant la carte électronique que vous utilisez).
Une résistance de pull-down "tire" le niveau électrique vers le bas, elle est donc reliée à la masse (GND) de votre carte.- Matériel et outils
- Fichiers
Bouton poussoir 

Un bouton (ou bouton poussoir) est un coupe-circuit mécanique (un interrupteur).
Arduino Uno 

Arduino, et son synonyme Genuino sont des micro-controleurs libres.
Cable Dupont
[[File:]]
Résistance 

Une résistance est un composant électronique ou électrique dont la principale caractéristique est d'opposer une plus ou moins grande résistance (mesurée en ohms) à la circulation du courant électrique.
Étape 1 - Faisons des essais sans résistance de pull-up
On réalise le montage comme sur le schéma ou la photo.
On charge le premier programme sur l'Arduino.
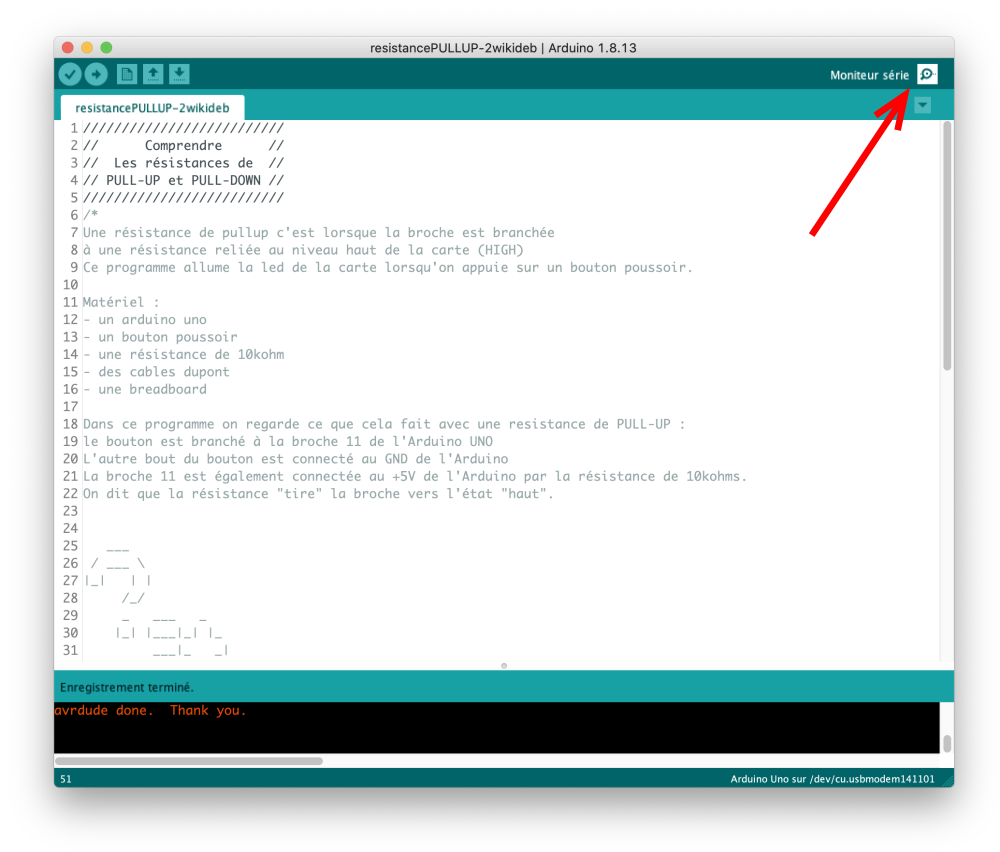
On ouvre le moniteur série.
Il ressort que moniteur série monteur un résultat qui n'est pas satisfaisant :
- L'état est fluctuant.
- Parfois après un appuis, l'état reste haut longtemps après qu'on ait relaché le bouton.
- Le comportement est imprévisible.



Étape 2 - Faisons des essais avec résistance de pull-up
On réalise le montage comme sur le schéma ou la photo.
On charge le premier programme sur l'Arduino
On ouvre le moniteur série.
Le résultat est mieux ! Les état sont clairs !



Étape 3 - Il parait qu'il y a des résistance de pull-up interne ?
Oui l'Arduino possède une résistance de pull-up interne à chaque broche numérique (c'est le cas d'autres carte comme le D1 mini).
Elle s'active dans le "setup" avec la fonction INPUT_PULLUP
void setup() {
pinMode(brocheBouton, INPUT_PULLUP);
}

Comment ça marche ?
Explications
Nous sommes entourés d'ondes électromagnétiques. Les ondes de la transmission de la radio, de la télé, etc. le courant électrique aussi émet des ondes électromagnétiques.
Ces ondes créent de l'électricité dans les broches des composants électroniques.
C'est pour cela qu'une broche connectée à rien, n'est pas forcément à l'état 0.
Une résistance de pull-up fixe l'état à HIGH (état haut).
Une résistance de pull-down fixe l'état à LOW (état BAS).
Applications : dans la vie de tous les jours
Pour des raisons matérielles que je n'ai pas vraiment comprises, on utilise les résistance de pull-up plutôt que des résistances de pull-down
Dernière modification 7/04/2021 par user:Antonydbzh.
Published