Cette page fournit une simple interface de navigation pour trouver des entités décrites par une propriété et une valeur nommée. D’autres interfaces de recherche disponibles comprennent la page recherche de propriété, et le constructeur de requêtes ask.
Liste de résultats
- Carapulte + (Commande en click and colect auprès de Leroy Merlin (commande composée de tasseaux et de tourillons).)
- Escape game numérique + (
#Soit utiliser notre genial.ly déjà créer …
#Soit utiliser notre genial.ly déjà créer.
##Voici le lien : https://view.genial.ly/61d572001d0f2b0ded9043cc/interactive-content-elysee
#Soit créer son propre escape game
##Mettre peut-être lien vers tuto amélioré
##Mettre quelques explications Lockee avec photo et dire que c'est un logiciel libre générateur de cadenas et qu'il suffit de se balader.
##Réfléchir au contexte
###Nous c'est "Macron a besoin d'un code secret".
##Aller sur lockee. Commencer par créer le cadenas avec un code pour pouvoir ensuite réfléchir à la trame.
##Faire des liens entre les photos et créer des indices pour résoudre le code tout au long de l'escape game.
code tout au long de l'escape game. <br/> ) - Configurez le réseau Wifi sur un ESP + (<nowiki>Lorsque vous installez la ca …
Lorsque vous installez la carte ESP dans le logiciel de développement ="mw-highlight mw-content-ltr" dir="ltr"><pre>#include <WiFi.h></pre></div><br/></nowiki>)
Arduino, le programme gérant la carte intègre d'office la bibliothèque Wifi, il n'est donc pas nécessaire de l'installer.Peu importe les modes de fonctionnement (Client ou point d’accès) , il suffit d’appeler en début de code la bibliothèque comme ceci :
Pour un WEMOS ou ESP8266 :#include
Pour un ESP32 :#include
- Code Minimal Réseau - (3) Mon D1 Mini récupère des données sur Internet (Json) + (<nowiki>Nous allons maintenant nous …
Nous allons maintenant nous intéresser à la récupération de données sur Internet (informations sur la météo, sur la pollution, sur les derniers recensements, ...). De nombreux serveurs de données, et en particulier les serveurs "Open Data" (offrant des données libres de droit), sont accessibles en mode web. C'est-à-dire qu'une simple requête dans la barre d'adresse de votre navigateur, permet de récupérer les informations souhaitées. )
Et, encore mieux, dans la plupart des cas, la réponse revient sous une forme standardisée de type '''JSON''' (JavaScript Objet Notation), que les navigateurs récents sont capables de décoder. A titre d'exemple, ouvrez un nouvel onglet dans votre navigateur, et recopiez dans la barre d'adresse ce qui suit ...
https://data.rennesmetropole.fr/api/records/1.0/search/?dataset=etat-du-trafic-en-temps-reel&q=rocade
... et vous devriez avoir en retour un texte de ce type :
{"nhits": 63, "parameters": {"dataset": "etat-du-trafic-en-temps-reel", "q": "rocade", "rows": 10, "start": 0, "format": "json", "timezone": "UTC"}, "records": [{"datasetid": "etat-du-trafic-en-temps-reel", "recordid": "c8cd4fc9d2a9f1840170322c834f827fc100cc75", "fields": {"traveltimereliability": 100, "traveltime": 55, "predefinedlocationreference": "30023", "averagevehiclespeed": 91, "datetime": "2022-11-29T15:11:00+01:00", "gml_id": "v_rva_troncon_fcd.fid-722fb9f8_184c264cda5_453f", "trafficstatus": "freeFlow", "func_class": 666, "geo_point_2d": [48.14130932076887, -1.6781068587055177], '''(...)'''
... mais que votre navigateur va quasi-immédiatement immédiatement reconnaître comme un format JSON, et afficher sous une forme plus structurée :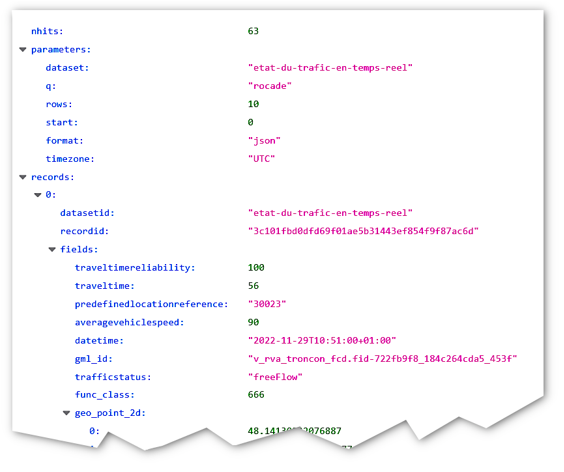
Nous avons fait ici appel au serveur Open Data de la ville de Rennes, et avons fait une requête demandant l'état du trafic sur la rocade principale. Ce même serveur propose un tas d'autres données libres, et on peut trouver sur Internet une multitude d'autres serveurs "Open Data" en mode JSON. - Communication entre ESP + (<nowiki>Pour récupérer l'adresse mac …
Pour récupérer l'adresse mac de ton microcontrôleur exécute cette commande dans la console : t;br />Tu peux aussi utiliser le bloc '''Récupérer l'adresse MAC'''.</nowiki>)L'adresse mac sera affichée entre guillemets.import network ; import ubinascii ;
ubinascii.hexlify(network.WLAN().config('mac'),':').decode()
Tu peux aussi utiliser le bloc '''Récupérer l'adresse MAC'''. - DataLab - Chapitre 0 - Fabriquer sa station de mesure connectée + ('''L'initiative de DataLab prend sa source … '''L'initiative de DataLab prend sa source de plusieurs constats :'''
- Actualité, économie, études scientifiques et sociales, compréhension de son environnement... Les données numériques sont PARTOUT !
- Les enjeux des données sont l'affaire de tous !
- On entend surtout parler de données personnelles et dangers sur notre vie privées mais beaucoup moins sur le potentiel et ce que permettent les données numériques dans notre quotidien.
- Malgré l'ouverture de jeux de données publiques, leurs usages par les citoyens restent encore minimes.
'''Comment se saisir des enjeux des données numériques et objets connectés ?''' => Jouons avec les donnés pour mieux les cerner !
'''Objectifs de DataLab :'''
- Favoriser la compréhension et l'intérêt des enjeux des données numériques.
- Lever les paliers techniques pour ouvrir l’usage des objets connectés au plus grand nombre.
- Animer une communauté. Ouvrir le dispositif auprès de nouveaux partenaires et échanger pour son évolution au service de projets à impacts positifs.
service de projets à impacts positifs. <br/>) - Attention, ça déborde ! + (''Précisions sur le matériel : Rassembler … ''Précisions sur le matériel : Rassembler des figurines et personnages en lien avec les activités humaines et la biodiversité : tracteur, voiture, randonneur, pêcheur, bateau, maison, vache, loutre, cerf, arbre...'' ''L'arrosoir peut être remplacé par une bouteille d'eau dont on aura percé le bouchon avec plusieurs trous.'' Mettre une première quantité d’eau de façon à remplir la zone la plus creusée de la maquette. Disposer sur la maquette différentes figurines et discuter de l’organisation possible de la vie autour du cours d’eau : maisons, champs, promeneurs, agriculture, animaux, pêcheurs, bateaux., agriculture, animaux, pêcheurs, bateaux.)
- Un capteur de CO2 avec un M5StickC et MH-Z19 + ( *Branchez le M5stick *Appuyez longuement … *Branchez le M5stick *Appuyez longuement sur le bouton ON/OFF (10 secondes) puis appuyez de façon breve pour allumer le M5stick *Rendez-vous sur la [https://dblocadata.debrouillonet.org/ page d'accueil Dblocadata] *Déroulez la page pour arriver sur la section "Installation de Micropython sur votre ESP32" *Sélectionnez le port USB sur lequel est connecté votre ESP32 *Cliquez sur "INSTALL MICROPYTHON X.XX" *Puis sur le bouton "INSTALL" *Patientez quelques minutes *Débranchez le M5STICK et appuyez longuement sur le bouton ON/OFF (10 secondes) puis un coup bref et rebranchez votre microcontrolleur à l'ordinateur nchez votre microcontrolleur à l'ordinateur )
- Thymio - découverte de l'interface VPL + (=== '''La barre d'outils''' ===
contient l … === '''La barre d'outils''' ===
contient les boutons pour ouvrir et sauvegarder des fichiers, lancer ou arrêter l'exécution du programme, et changer de mode d'édition.
=== '''Le programme''' ===
Cette zone est dédiée à la construction du programme. Le programme sert au robot à savoir comment se comporter.
=== '''Le compilateur''' ===
Cette ligne indique si les paires événement-action du programme sont correctes et complètes.
=== '''Les blocs d'événements''' ===
déterminent ''quand ''le robot doit démarrer une action. Ces blocs peuvent être ajoutés au programme en cliquant dessus ou en les glissant sur le carré orange qui apparaît dans le programme.
=== '''Les blocs d'action''' ===
Ces blocs déterminent ''comment ''le robot doit réagir.
nt ''comment ''le robot doit réagir. <br/>) - Découvrir la conductivité avec le Makey-Makey + (Allumer l'ordinateur et brancher le Makey-Makey à l'ordinateur à l'aide du câble USB fourni.)
- Utiliser le D1 mini avec Arduino + (Allumez le logiciel Arduino. Allez dans le menu Arduino -> Préférence, une fenêtre s'ouvre. Dans le champ '''"URL de gestionnaire de cartes supplémentaires"'''copiez-collez l'URL suivante : http://arduino.esp8266.com/stable/package_esp8266com_index.json)
- Robot électro-mecanique + (Cette plateforme filo-guidée est constitué … Cette plateforme filo-guidée est constituée par un plateau porté par 3 roues. Ses mouvements sont commandés à partir de deux inverseurs montés sur une planchette (manette de commande). Dans les 3 roues, il y a deux roues motrices et une roue libre - les deux roues motrices sont indépendantes, mues par deux moto-réducteurs indépendants - la roue libre est une roulette qui prend l'orientation imposée par les deux roues motrices (comme une roulette de caddy) Comme les deux roues motrices sont indépendantes, on peut - aller tout droit, en avant et en arrière - tourner à droite ou à gauche autour d'une seule roue - tourner à droite ou à gauche autour d'un centre situé entre les deux roues motrices De cette façon, il est facile d'échapper à la plupart des obstacles. On peut qualifier cette plateforme d'agile.n peut qualifier cette plateforme d'agile.)
- Carapulte +
- Les petits pois de Mendel + (Commence par télécharger et imprimer les c … Commence par télécharger et imprimer les cartes disponibles dans l'un des deux fichiers suivants : *Un au format [https://www.wikidebrouillard.org/images/a/ac/Les_petits_poids_de_Mendel_CartesPetitsPois.pdf PDF] *Un au format [https://www.wikidebrouillard.org/images/f/f0/Les_petits_poids_de_Mendel_Petit_de_brouillard.odg ODG] Imprime les différentes cartes en plusieurs exemplaires (idéalement plus de 5 chacun). Ensuite, découpe les différentes cartes. Ensuite, découpe les différentes cartes.)
- Kinetic Wooden Door by KINETRIX + (Discussion en groupe du projet de la porte … Discussion en groupe du projet de la porte kinetique. Bilan des achats nécessaires et de la répartition des tâches. Nous avons dressé le cahier des charges, ainsi que les diagrammes Bête à Corne et Pieuvre. Pour la répartition des tâches: * Solal et Thomas ont suivi un atelier impression 3D * Matthieu à suivi un atelier de formation à la sécurité et aux outils * Alizée, Clémence et Maxime se sont occupés du WikiDébrouillard et d'archiver le projetu WikiDébrouillard et d'archiver le projet)
- Fiche de fabrication d'une maquette de bassin versant transportable + (Découper au cutter 8 pièces de polystyrène de 48 x 96 cm, que l'on nommera "pièces de type C".)
- Fabriquer une base de lancement pour des fusées à eau + (En complément des outils listés précédemme … En complément des outils listés précédemment, il vous faudra du matériel pour réaliser la base. La liste de matériel commentée est a votre disposition dans les fichiers. Il est préférable de consulter l'ensemble de ce tutoriel avant de choisir son matériel, car il présente différentes alternatives. car il présente différentes alternatives.)
- Déchets, microplastiques et dégradation en mer + (Fiche “microplastiques“ Fresque “Dégradation” 14 Jetons déchets)
- Fiches défis Enquête santé + (Imprimer les fiches défis avec l'aide et l … Imprimer les fiches défis avec l'aide et les feuilles de présentation des experts en A4, ainsi que les posters "avant" et "après" en A3. Découpez le poster "après" suivant le quadrillage. Organiser l'espace pour que chaque défi soit bien distinct des autres. Certaines expériences (voir la partie "aide à l'animateur·rice" à la fin des fiches défis) auront besoin d'être mis en place avant que les groupes ne soient prêts.ace avant que les groupes ne soient prêts.)
- Le DebrouilloKit - Multipliez les expériences ! + (L'ensemble des informations utiles à la fa … L'ensemble des informations utiles à la fabrication de ce kit, se trouve dans un dossier compressé '''Debrouillokit-V01.zip''', disponible dans le lien indiqué dans la rubrique "fichiers" ci-avant. Bon, allez, je le remets également ici : [https://cloud.debrouillonet.org/s/Sk7K3rCMaqPNYdH DebrouilloKit-V01.zip].
Ce fichier compressé contient les répertoires suivants :
Dossier Utilisation A - Circuit Imprimé (projet Kicad) Fichiers Kicad de définition du circuit imprimé. Le fichier '''DK_PCB.zip''' évoqué à l'étape 2 se trouve dans le répertoire JLCPCB. B - Découpe Laser (boites) Fichiers au format svg, pour la découpe laser des boitiers, à utiliser à l'étape 3. C - Impression 3D (boutons) Fichiers Blender et STL pour l'impression en 3D des boutons et de la molette du potentiomètre, à utiliser à l'étape 4. D - Applications (code Arduino) Contient le répertoire '''DebrouilloBox''', qui lui-même contient 8 modules de programmation Arduino. Voir étape 8 pour plus de détails. E - Fiches Applicatives Fiches à imprimer (et éventuellement modifier) pour les poser sur les boitiers du kit, en fonction de l'application que l'on souhaite utiliser. Voir à l'étape 7 comment imprimer et découper proprement ces fiches applicatives.
t;Fiches à imprimer (et éventuellement modifier) pour les poser sur les boitiers du kit, en fonction de l'application que l'on souhaite utiliser. Voir à l'étape 7 comment imprimer et découper proprement ces fiches applicatives. </td></tr></table> <br/>) - Scan 3D Party - Numériser le patrimoine de sa ville + (La caméra Kinect est une caméra de reconna … La caméra Kinect est une caméra de reconnaissance de mouvements utilisée il y a maintenant quelques années avec la console de jeux vidéo Xbox 360. Avec un succès mitigé, la Kinect 360 trouva une seconde vie grâce aux makers et bidouilleurs.ieuses ayant détourné son l'utilisation initiale et utiliser ses propriétés de caméra infrarouge dans de tous nouveaux projets. La Kinect 360 est maintenant utilisée dans de nombreuses installations artistiques, numériques, scientifiques... et peux même être très facilement utilisable comme un scanner 3D. La caméra, suite à son échec, est très facilement trouvable en occasion sur internet et dans les boutique de reventes entre 10 ou 20€. Elle rivalise presque avec les scanner 3D d'entrée de gamme de plusieurs centaines d'euro (!).e gamme de plusieurs centaines d'euro (!).)
- CATAPONG + (La catapulte seule est composée d'un plateau, d'armatures, d'un axe de rotation, d'un bras de levier, d'un tasseau pour surélever la position initiale de celui-ci, de tasseaux pour encadrer la chute du verre.)
- Cyanotype : La photo qui fait bronzette + (Le matériel à avoir est simple... si ce n' … Le matériel à avoir est simple... si ce n'est les composés du cyanotype lui même. On peut trouver les deux composés en kit, qu'il convient uniquement de compléter avec de l'eau. (les quantités sont indiqués)
'''Matériel'''
– Kit de cyanotype ( [https://www.ebay.fr/i/174195513004?chn=ps&norover=1&mkevt=1&mkrid=709-134431-41854-0&mkcid=2&itemid=174195513004&targetid=884405960814&device=c&mktype=pla&googleloc=9056412&poi=&campaignid=9557022446&mkgroupid=97888222243&rlsatarget=pla-884405960814&abcId=1139516&merchantid=6995724&gclid=Cj0KCQjwybD0BRDyARIsACyS8mtu-bpkEGjpDagMh-yxLC9moTBsLu_-5DmJjNU2BBgO8dDb6tCTNXIaAiOrEALw_wcB internet])
– Papier à dessin ou autre support comme du tissu
– Rouleau ou une éponge, ou un pinceau.
– Eléments à "photographier" ( quelques en photo : les objets disposés sur table rouge)
– Bassine un peu plus grande que la taille du papier choisi pour vos clichés
– et du soleil ! (ou une lampe UV si celui-ci manque)
'''Bonus''' (pas nécessaire, mais c'est mieux)
– Tablier et des protections (lunettes, gants)
- Plaque de verre
- Vinaigre ou eau oxygénée
- Pinces à linge
- support de séchage
'''Espaces'''
- 1 espace à l'abri du soleil, une pièce sans fenêtre ou fermée par des volets (la lumière articficielle, hors lampe UV, ne fait pas réagir le produit)
- 1 espace avec du soleil et/ou lampe UV
(Kit cyanotype : 20g de citrate d’ammonium, 8g de ferricyanure de potassium et 200 ml d’eau distillée. )
Plusieurs sites
[https://www.etsy.com/fr/listing/749154749/kit-cyanotype?ref=shop_home_feat_3 KIT cyanotype]
[https://www.etsy.com/fr/listing/489862679/kit-de-cyanotype-de-diy-photographie?ga_order=most_relevant&ga_search_type=all&ga_view_type=gallery&ga_search_query=cyanotype&ref=sr_gallery-1-2&organic_search_click=1 KIT Cyanotype 2]
[https://www.etsy.com/fr/listing/489863809/recharges-pour-le-bleu-cyanotype?ga_order=most_relevant&ga_search_type=all&ga_view_type=gallery&ga_search_query=cyanotype&ref=sr_gallery-1-3&organic_search_click=1 KIT cyanotype simple]
rch_type=all&ga_view_type=gallery&ga_search_query=cyanotype&ref=sr_gallery-1-3&organic_search_click=1 KIT cyanotype simple] <br/>) - Commander un D1 mini avec une interface web + (Le schéma de montage, également indiqué da … Le schéma de montage, également indiqué dans le code Arduino, est défini dans la première image. Nous recommandons d'utiliser une "breadboard", pour fixer le D1 mini et gérer l'ensemble des connexions. Nous avons utilisé ici celle livrée dans le kit d'initiation Arduino (Starter kit Arduino®). Les leds, les résistances, et le potentiomètre, proviennent d'ailleurs du même kit. Le montage des 5 leds (sur les pins D0 à D4) ne pose pas de problème particulier, attention cependant à respecter la polarité +/-, et ne pas oublier de mettre les résistances afin de limiter le courant électrique. Concernant le servo moteur, il faut l'alimenter via le pin GND, bien sûr, et la sortie 5V du D1 mini (celui-ci a également une sortie 3,3v, insuffisante pour le servomoteur). La commande du servomoteur sera connectée quant à elle, sur le pin D7 du D1 mini. Et enfin,le potentiomètre aura ses deux connexions externes connectées d'une part sur GND, d'autre part sur le pin '''3,3V''' (important, car c'est la tension maximale qui sera alors disponible sur la connexion centrale du potentiomètre, et qui sera acceptée par le pin A0 du D1 mini ; au-delà le D1 mini risque de souffrir). ; au-delà le D1 mini risque de souffrir).)
- DataLab - Chapitre 1 - Rassembler le matériel + (Les composants électroniques pour la fabri … Les composants électroniques pour la fabrication d'une station connectée DataLab sont trouvables sur de nombreux sites marchands et fournisseurs en ligne''', aux stocks plus ou moins distants, prix et délais de livraison très variables et propre à chacun.''' Voici une liste de fournisseur rassemblés à partir des habitudes des contributeurs. ''Il n'y a aucune affiliation ou rémunération avec ces sites. Nous ne nous portons pas garants ou responsables de tout problème sur la livraison, la commande ou le matériel défectueux très rares de notre expérience mais inhérents à toute commande en ligne.'' - Vittascience - Go Tronic - Lextronic - Seeed Studio - Adafruit - Semageek - également les grandes plateformes Amazon, Aliexpress, Banggood Si vous ne souhaitez pas investir immédiatement et tester le matériel en amont, vous pouvez vous rapprocher d'un des 300 Fablabs, makerspaces, hackerspaces en France et ailleurs dans le monde, où vous serez accompagné.e, initié.e, et où vous pourrez retrouver certainement le matériel pour tester ces tutos : https://www.fablabs.io/labs/mapes tutos : https://www.fablabs.io/labs/map)
- Cataflèchette + (Nous avions le choix entre le trébuchet et … Nous avions le choix entre le trébuchet et la catapulte. Nous avons opter pour la catapulte car c'est le projet qui nous a paru le plus intéressant, elle permet plus de précision et lance les projectiles avec une vitesse plus réduite, ce qui dans un cadre scolaire nous parait plus judicieux.cadre scolaire nous parait plus judicieux.)
- Catapulte avec rotation électrique + (On vous conseille avant d'acheter quoi que … On vous conseille avant d'acheter quoi que ce soit de vérifier si vous ne pouvez pas recycler des matériaux . Par exemple nous aurons besoin de deux Roulements à bille dans la partie 6, pensez aux roulements à bille des Handspinners ! Récupérez aussi les cagettes à fruits pour le caisson et des linteaux, un vieux stylo à bille, 50 cm de fil, des élastiques et un classeur très rigide.des élastiques et un classeur très rigide.)
- Apprends à construire ton filet de pêche ! + (Pour cela vous aurez besoin : Pour le c … Pour cela vous aurez besoin : Pour le collectif : - Bobines de fil en coton - Protocoles constructions plastifiés et/ou en classeur Par personne : - Aiguille à ramender (cf photo, ici imprimé en 3D avec le modèle ci joint, ou acheter) - Plaquette pour maille 70mm carton - Support attache filet - Ciseauxcarton - Support attache filet - Ciseaux)
- Tutoriel de course SuperTuxKart depuis minetest + (Pour commencer, il faut aller sur le site … Pour commencer, il faut aller sur le site https://www.ign.fr/minecraft/.
'''[IMAGE 1]''' Une fois sur le site, renseignez l'adresse qui sera le centre de la map minetest (rectangle rouge), puis renseignez l'adresse mail à laquelle vous voulez que la map vous soit envoyé, enfin, plateforme vous demande votre système d'exploitation et le jeu sur lequel vous voulez cette carte (minetest dans ce tutoriel). une fois fini appuyez sur le bouton "Générez votre carte".
'''[IMAGE2]''' Une fois le bouton appuyé cette fenêtre va s'afficher. Attention le captcha change chaque fois que vous appuyez sur "valider" et devra être réécri si vous oubliez de cocher une case.
'''[IMAGE3]''' Après un petit temps ce mail vous sera envoyé et vous aurez un temps d'attente de 5 à 25 minutes selon la taille de la map et l'utilisation de leurs serveurs.
ext">IGN n'autorise qu'un seul export par tranche de 12 heures.</div> </div><br/>) - Les Plans Chat Pains + (Pour répondre à la problématique posée par … Pour répondre à la problématique posée par notre professeur, nous avons choisi de construire une planche à découper pouvant se déplier en étagère, ce qui permettrai d'optimiser l'espace et qui soit utile à tous types d'utilisateurs. Dans le but, de le réaliser, de façon la plus diversifiée possible, nous avons utilisé l'impression 3D ainsi que du travail manuel dans l'atelier de l'EPF.du travail manuel dans l'atelier de l'EPF.)
- Diagnostic Eau + (Première étape, celle du recensement des p … Première étape, celle du recensement des points d'eau du bâtiment. Ne pas oublier les robinets extérieurs (par exemple pour le bricolage, l’arrosage, etc.) ainsi que ceux destinés aux machines (lave-linge, réfrigérateur type américain, lave-vaisselle, chaudière...). Il est parfois nécessaire de visiter toutes les pièces pour se rappeler un point d'eau oublié. Ce n'est pas parce que ce robinet n'est plus utilisé qu'il ne fuit pas... Une fois ceci réalisé, on connait le nombre de points d'eau dans le bâtiment étudié. On peut ensuite réaliser le diagnostic "par étape" ou répartir le travail d'enquête entre plusieurs personnes. Les fiches support des différentes étapes sont disponibles pour le téléchargement dans l'onglet "Fichiers" ci-dessus.gement dans l'onglet "Fichiers" ci-dessus.)
- Installer l'environnement Arduino sur votre système + (Rendez-vous sur le site https://www.arduino.cc/ et téléchargez la version correspondante à votre système d'exploitation)
- Énigme d'Escape Game - Carte magnétique et carte au trésor + (Réaliser le montage suivant <br/>)
- Jeu du robot + (Sur un carton ou une feuille de papier, dessiner un quadrillage constitué de carrés identiques. Ici, nous avons choisi de faire un plateau de 20 cm x 20 cm. Le plateau est découpé en 25 cases. Chaque case fait 4 cm de côté.)
- Découverte du robot Thymio + (Sur une feuille, dessine un robot. Comment-est-il ? Quelles sont ses fonctions particulières ? Si tu as envie d'aller plus loin, tu peux utiliser du matériel de récupération pour construire un robot tel que tu l'imagines.)
- Touche Point Médian sur son clavier pour faciliter l'écriture Inclusive + (Téléchargez la dernière version stable ("C … Téléchargez la dernière version stable ("Current Version") du Logiciel '''AutoHotkey''' à partir du site officiel : https://www.autohotkey.com/ Et installez le logiciel sur votre ordinateur en suivant la procédure. Si vous n'êtes pas à l'aise avec cette étape cliquez sur '''''"Express Installation"''''' après avoir lancé l'installateur avec le fichier '''setup.exe'''. Enfin une fois l'installation effectuée, cliquez sur '''''"Exit".'''''n effectuée, cliquez sur '''''"Exit".''''')
- Tuto interface scratch + (Vous-avez le choix du language comme indiqué sur le numéro 1)
- Hackitivity Kit - Hackasaurus + ([https://www.wikidebrouillard.org/images/7 … [https://www.wikidebrouillard.org/images/7/75/Hackitivity_Kit_-_Hackasaurus_Hacktivity_Kit-FR.pdf Téléchargez.]
Ce kit d'hacktivité permet à chacun d'organiser facilement sa propre session de bidouille, où bon lui semble. Ce kit, créé à partir d’ateliers pilotes organisés par Hive Learning Network à New-York et à Chicago, regorge d'informations et de ressources qui facilitent l'organisation d'événements ou de cours en rapport avec la conception Web.
Cette brochure est composée de cinq étapes qui vous guideront dans la mise en place et l'organisation d'une session de bidouille en ayant recours à la suite d'outils Hackasaurus. Chaque étape fera un point sur les éléments à prendre en compte lors de la préparation de vos activités de conception Web. Tout y est inclus, des meilleures techniques pour faire connaître l’événement aux moyens d’évaluer les progrès des participants. Vous y trouverez également un exemple de plan de cours. Pour que votre session soit la plus pédagogique possible, aidez-vous de la section « Ressources » : elle contient des documents imprimables, comme un formulaire d'inscription pour les bénévoles ou un pense-bête sur les lunettes à rayons X.
Description issue du livret, sous licence CC-By-Sa.
Cette traduction a été coordonnée par [http://www.gobanclub.net/ Caroline Comacle, traductrice indépendante] intervenante professionnelle au sein du [http://formations.univ-brest.fr/fiche/FR_RNE_0290346U_PROG7754/FR_RNE_0290346U_PROG8293/presentation Master Rédacteur/Traducteur de l’UBO].
ter Rédacteur/Traducteur de l’UBO]. <br/>)
