| (9 révisions intermédiaires par un autre utilisateur non affichées) | |||
| Ligne 1 : | Ligne 1 : | ||
{{Tuto Details | {{Tuto Details | ||
| − | |Main_Picture=SMARS_- | + | |Main_Picture=SMARS_-_Fabriquer_un_SMARS_IMG_0547.jpg |
|Licences=Attribution (CC-BY) | |Licences=Attribution (CC-BY) | ||
|Description=Imprimer, assembler et paramétrer le SMARS | |Description=Imprimer, assembler et paramétrer le SMARS | ||
| Ligne 45 : | Ligne 45 : | ||
|Prerequisites=SMARS - Adpatation du Motor Shield d'Adafruit | |Prerequisites=SMARS - Adpatation du Motor Shield d'Adafruit | ||
}} | }} | ||
| + | |Tuto_Attachments={{Tuto Attachments}} | ||
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
|Step_Title=Faire un listing des pièces et du matériels | |Step_Title=Faire un listing des pièces et du matériels | ||
| − | |Step_Content=* 1 x Arduino Uno R3 DIP | + | |Step_Content=*1 x Arduino Uno R3 DIP |
| − | * 1 x Arduino Motor Shield | + | *1 x Arduino Motor Shield |
| − | * 1 x ultrasons HC-SR04 (optionnel) | + | *1 x ultrasons HC-SR04 (optionnel) |
| − | * 1 x capteur IR ( optionnel) | + | *1 x capteur IR ( optionnel) |
| − | * 2 x motoréducteur 200 RPM 6V | + | *2 x motoréducteur 200 RPM 6V |
| − | * 8 x Cavalier de câble femelle à femelle 10cm | + | *8 x Cavalier de câble femelle à femelle 10cm |
| − | * 4 x Câble AWG24 ( câbles électrique) | + | *4 x Câble AWG24 ( câbles électrique) |
| − | * 1 x connecteur 9V Batterie | + | *5 x câble dupont |
| − | * 1 x batterie 9V | + | *1 x connecteur 9V Batterie |
| − | * 1 x support de batterie (2 x Li-ion 14500) | + | *1 x batterie 9V |
| − | * 1 x câble USB | + | *1 x support de batterie (2 x Li-ion 14500) |
| − | * 2 x spool de filament 3D ( pour plusieurs couleurs) | + | *1 x câble USB |
| − | * 1 x imprimant 3D | + | *2 x spool de filament 3D ( pour plusieurs couleurs) |
| − | |Step_Picture_00=SMARS_- | + | *1 x imprimant 3D |
| − | |Step_Picture_01=SMARS_- | + | *2 x résistances de 100 Ohm |
| − | |Step_Picture_02=SMARS_- | + | *1 x condensateur bipolaire de 1uF/50V |
| + | |Step_Picture_00=SMARS_-_Fabriquer_un_SMARS_IMG_20220329_102708.jpg | ||
| + | |Step_Picture_01=SMARS_-_Fabriquer_un_SMARS_IMG_20220328_144528.jpg | ||
| + | |Step_Picture_02=SMARS_-_Fabriquer_un_SMARS_IMG_20220328_144614.jpg | ||
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
| Ligne 71 : | Ligne 75 : | ||
<br /> | <br /> | ||
| − | * Châssis | + | *Châssis |
| − | * Roues menantes x2 | + | *Roues menantes x2 |
| − | * Roues menées x2 | + | *Roues menées x2 |
| − | * Chenilles mécaniques x32 | + | *Chenilles mécaniques x32 |
| − | * Carte de maintien (pour la batterie 9v) | + | *Carte de maintien (pour la batterie 9v) x2 |
| − | * Porte-télémètre | + | *Porte-télémètre |
| − | * Couvercle du télémètre | + | *Couvercle du télémètre |
| − | * Connecteur | + | *Connecteur |
Conseil: Le châssis est la pièce centrale et la plus longue réaliser donc la première à imprimer parmi cette petite liste d'impressions 3D. | Conseil: Le châssis est la pièce centrale et la plus longue réaliser donc la première à imprimer parmi cette petite liste d'impressions 3D. | ||
| − | |Step_Picture_00=SMARS_- | + | |Step_Picture_00=SMARS_-_Fabriquer_un_SMARS_thumbnail_IMG_20220329_103541.jpg |
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
| Ligne 89 : | Ligne 93 : | ||
<br /> | <br /> | ||
| − | * 2 moteurs | + | *2 moteurs |
| − | * 4 câbles électrique de 13 cm ( 2 rouges et 2 noirs) | + | *4 câbles électrique de 13 cm ( 2 rouges et 2 noirs) |
| − | * un fer à souder | + | *un fer à souder |
| − | * de l'étain | + | *de l'étain |
| − | * une troisième mains (optionnel) | + | *une troisième mains (optionnel) |
| − | * de la gaine thermorétractable | + | *de la gaine thermorétractable |
Conseil: fait attention au borne avant de souder il faut toujours vérifier où se situe le + et le - . | Conseil: fait attention au borne avant de souder il faut toujours vérifier où se situe le + et le - . | ||
| Ligne 101 : | Ligne 105 : | ||
<br /> | <br /> | ||
| − | |||
| − | |||
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
| Ligne 110 : | Ligne 112 : | ||
Conseil: Si ton moteur est pas correctement poser à l'horizontale, il est possible que t'es roues par la suite frotte le châssis et donc résulte a une perte de vitesse de ton SMARS ! | Conseil: Si ton moteur est pas correctement poser à l'horizontale, il est possible que t'es roues par la suite frotte le châssis et donc résulte a une perte de vitesse de ton SMARS ! | ||
| − | |Step_Picture_00=SMARS_- | + | |Step_Picture_00=SMARS_-_Fabriquer_un_SMARS_IMG_20220329_142954.jpg |
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
| Ligne 118 : | Ligne 120 : | ||
Conseil: Fait toujours sortir les câbles électrique par leurs sorties respectives afin d'éviter tout emmêlements et un bazar de câble inutile ! | Conseil: Fait toujours sortir les câbles électrique par leurs sorties respectives afin d'éviter tout emmêlements et un bazar de câble inutile ! | ||
| − | |Step_Picture_00=SMARS_- | + | |Step_Picture_00=SMARS_-_Fabriquer_un_SMARS_IMG_20220329_143012.jpg |
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
| Ligne 126 : | Ligne 128 : | ||
Conseil: tu devra légèrement plier les supports pour les faire entrés dans leurs encoches respectives et placer les câbles à travers afin de ne pas se retrouver avec un câble trop court ! | Conseil: tu devra légèrement plier les supports pour les faire entrés dans leurs encoches respectives et placer les câbles à travers afin de ne pas se retrouver avec un câble trop court ! | ||
| − | |Step_Picture_00=SMARS_- | + | |Step_Picture_00=SMARS_-_Fabriquer_un_SMARS_IMG_20220329_143143.jpg |
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
|Step_Title=Montage des roues | |Step_Title=Montage des roues | ||
|Step_Content=Pour monter les roues rien de plus simple que de les faire glisser dans les encoches imprimer pour les roues menées et les encoches "métallique" des moteurs pour les roues menantes | |Step_Content=Pour monter les roues rien de plus simple que de les faire glisser dans les encoches imprimer pour les roues menées et les encoches "métallique" des moteurs pour les roues menantes | ||
| − | |Step_Picture_00=SMARS_- | + | |Step_Picture_00=SMARS_-_Fabriquer_un_SMARS_IMG_20220329_143209.jpg |
| − | |Step_Picture_01=SMARS_- | + | |Step_Picture_01=SMARS_-_Fabriquer_un_SMARS_IMG_20220329_143307.jpg |
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
| − | |Step_Title= | + | |Step_Title=Assemblage des chenilles |
| − | |Step_Content=Pour | + | |Step_Content=Pour assembler correctement les chenilles il te faudra prendre un peu de PLA (filament 3D) et de l'installer dans l'encoche des chenilles et ainsi de suite pour les deux chenilles. |
| + | |||
| + | |||
| + | Conseil: Laisse un morceau de chenille sans l'attacher au reste car tu va devoir placer la chenille puis la refermer | ||
| − | |||
| + | Il te suffit de placer la carte dans l'emplacement dédié et de pousser légèrement jusqu'à la butée du châssis. | ||
| − | Conseil: | + | |
| − | |Step_Picture_00=SMARS_- | + | Conseil: rien ne sert de forcer tu risque de casser soit ta carte soit ton châssis et ce n'est pas le résultat attendue ! |
| + | |Step_Picture_00=SMARS_-_Adpatation_du_Motor_Shield_d_Adafruit_IMG_20220329_140152.jpg | ||
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
| Ligne 150 : | Ligne 156 : | ||
Conseil: rien ne sert de forcer tu risque de casser soit ta carte soit ton châssis et ce n'est pas le résultat attendue ! | Conseil: rien ne sert de forcer tu risque de casser soit ta carte soit ton châssis et ce n'est pas le résultat attendue ! | ||
| − | |Step_Picture_00=SMARS_- | + | |Step_Picture_00=SMARS_-_Fabriquer_un_SMARS_IMG_20220329_141136.jpg |
| − | |Step_Picture_01=SMARS_- | + | |Step_Picture_01=SMARS_-_Fabriquer_un_SMARS_IMG_20220329_141154.jpg |
}} | }} | ||
| − | {{ | + | {{Notes |
| − | | | + | |Notes=utilisation du site thingiverse pour les modèles 3D |
| − | + | ||
| + | |||
| + | inspiré du site "instructables circuit" | ||
| + | |||
| + | https://www.instructables.com/SMARS-Robot-Arduino-Smart-Robot-Tank-Bluetooth/ | ||
| + | https://www.instructables.com/Upgrade-Motor-Shield-for-SMARS-Robot-Arduino-Uploa/ | ||
| − | + | https://www.instructables.com/Program-Your-Arduino-With-an-Android-Device-Over-B/ | |
| − | |||
| − | |||
| − | |||
| − | |||
}} | }} | ||
| − | |||
{{Tuto Status | {{Tuto Status | ||
|Complete=Draft | |Complete=Draft | ||
}} | }} | ||
Version actuelle datée du 5 mai 2022 à 10:29
Imprimer, assembler et paramétrer le SMARS

Difficulté
Technique
Durée
3 heure(s)
Disciplines scientifiques
Arduino, Electricité
Sommaire
- 1 Étape 1 - Faire un listing des pièces et du matériels
- 2 Étape 2 - Imprimer les pièces 3D
- 3 Étape 3 - Soudure sur les moteurs
- 4 Étape 4 - Monter les moteurs dans le châssis
- 5 Étape 5 - Pose de la batterie/pile
- 6 Étape 6 - Installations des supports moteur
- 7 Étape 7 - Montage des roues
- 8 Étape 8 - Assemblage des chenilles
- 9 Étape 9 - Ajouter la carte arduino avec le shield
- 10 Éléments pédagogiques
- 11 Commentaires
- Matériel et outils
- Expériences pré-requises
Shield Motor 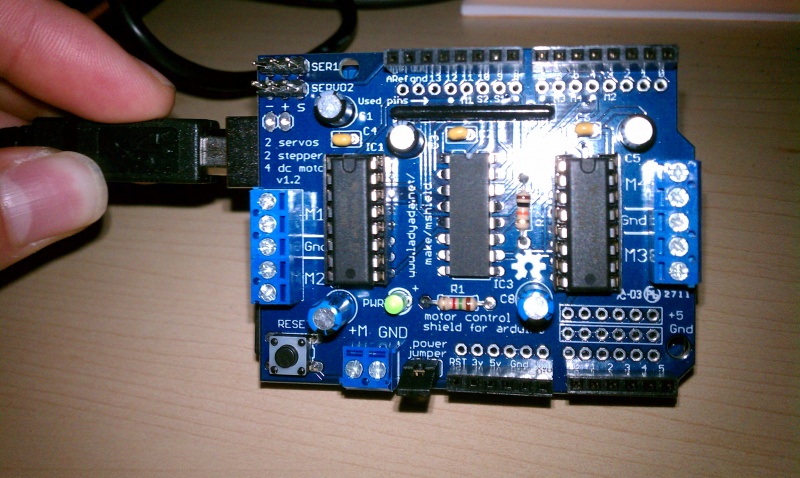

permet de contrôler 2 moteurs CC ou 1 moteur pas à pas chaque moteur est contrôlé par une broche de sens et une broche de vitesse PWM, dispose de LEDs de fonctionnement et de diodes de protection + bouton reset
intensité maximale de 2A/ phase ou moteur (4A en tout)
dispose d'un capteur analogique d'intensité intégré (+++) (0V + 1,65V/A) pour chaque phase/moteur dispose de connecteurs droits pour 2 entrées analogiques, 2 sorties PWM et TWI
alimentation entre 7 et 12V / 4000mA Arduino Uno 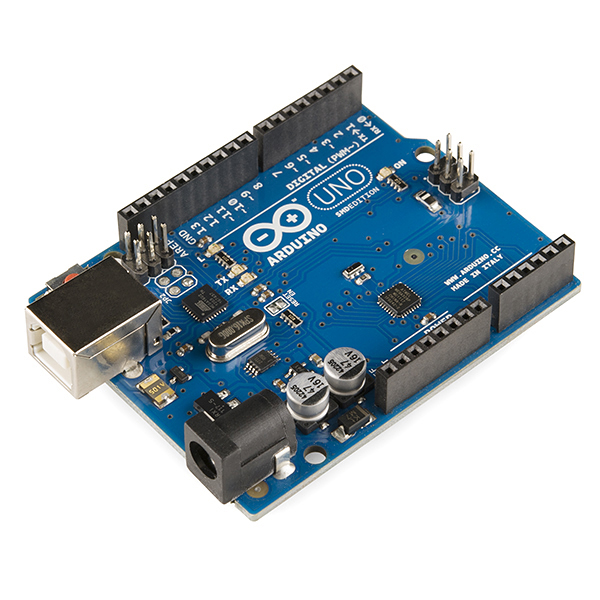

Arduino, et son synonyme Genuino sont des micro-controleurs libres.
Bluetooth Module HC-05
[[File:]]
Pile 9V 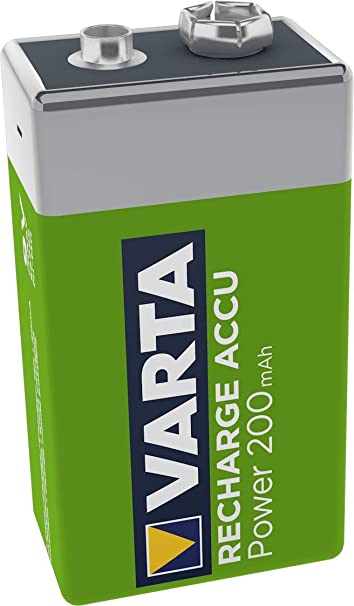

Pile rechargeable Varta 200mAh, 9V, rectangulaire 2,65 x 4,85 x 1,75 cm
Câble Dupont 

Les câbles de connexion servent à créer rapidement des liaisons électriques sur des platines de prototypage sans avoir besoin de faire des soudures.
Led
[[File:]]
Fer à souder 

Un fer à souder, ou plus précisément un fer à braser, est un outil chauffant permettant de réaliser une opération de brasage. L'usage courant du fer à souder se fait dans le domaine du montage de composants électroniques.
Étain 

fil d'étain ou bobine d'étain
Fil de soude 

Le fil à souder : le métal d'apport en continu.
Fil à souder
La soudure nécessite l'emploi d'une électrode et parfois d'un métal d'apport. Selon le type de soudure, on utilise une électrode soudure, du fil à souder ou des baguettes à souder. Résistance 

Une résistance est un composant électronique ou électrique dont la principale caractéristique est d'opposer une plus ou moins grande résistance (mesurée en ohms) à la circulation du courant électrique.
Condensateur 

Sa propriété principale est de pouvoir stocker des charges électriques opposées sur ses armatures. La valeur absolue de ces charges est proportionnelle à la valeur absolue de la tension qui lui est appliquée. Le condensateur est caractérisé par le coefficient de proportionnalité entre charge et tension appelé capacité électrique et exprimée en farads (F).
Moteur électrique 

Les moteurs électriques sont des machines dites à courant continue.
En fonctionnement moteur, l'énergie électrique est transformée en énergie mécanique.En fonctionnement générateur, l'énergie mécanique est transformée en énergie électrique (elle peut se comporter comme un frein). Dans ce cas elle est aussi appelée dynamo.
Filament 3D 

Un filament a nécessaire a l'impression 3d.
Imprimante 3D 

L'impression 3D ou impression tridimensionnelle est l’appellation « grand public » des procédés de fabrication de pièces en volume par ajout ou agglomération de matière.
Étape 1 - Faire un listing des pièces et du matériels
- 1 x Arduino Uno R3 DIP
- 1 x Arduino Motor Shield
- 1 x ultrasons HC-SR04 (optionnel)
- 1 x capteur IR ( optionnel)
- 2 x motoréducteur 200 RPM 6V
- 8 x Cavalier de câble femelle à femelle 10cm
- 4 x Câble AWG24 ( câbles électrique)
- 5 x câble dupont
- 1 x connecteur 9V Batterie
- 1 x batterie 9V
- 1 x support de batterie (2 x Li-ion 14500)
- 1 x câble USB
- 2 x spool de filament 3D ( pour plusieurs couleurs)
- 1 x imprimant 3D
- 2 x résistances de 100 Ohm
- 1 x condensateur bipolaire de 1uF/50V



Étape 2 - Imprimer les pièces 3D
Commencer par imprimer les pièces en 3D et la meilleure chose à faire en premier car c'est l'étape la plus longue de tout ce projet SMARS !
- Châssis
- Roues menantes x2
- Roues menées x2
- Chenilles mécaniques x32
- Carte de maintien (pour la batterie 9v) x2
- Porte-télémètre
- Couvercle du télémètre
- Connecteur
Conseil: Le châssis est la pièce centrale et la plus longue réaliser donc la première à imprimer parmi cette petite liste d'impressions 3D.

Étape 3 - Soudure sur les moteurs
Pour souder les câbles électrique, il te faudra:
- 2 moteurs
- 4 câbles électrique de 13 cm ( 2 rouges et 2 noirs)
- un fer à souder
- de l'étain
- une troisième mains (optionnel)
- de la gaine thermorétractable
Conseil: fait attention au borne avant de souder il faut toujours vérifier où se situe le + et le - .
Pour éviter un quelconque risque que ton moteur ne fonctionne pas, ajoute sur chaque câble électrique environ 3 cm de gaine thermorétractable que tu viendra poser au niveau de tes soudure et chauffera cette gaine avec le fer à souder.
Étape 4 - Monter les moteurs dans le châssis
Une fois que tu aura souder les moteur, tu peux alors poser les moteur dans leurs emplacements respectifs et voir si rien ne gêne.
Conseil: Si ton moteur est pas correctement poser à l'horizontale, il est possible que t'es roues par la suite frotte le châssis et donc résulte a une perte de vitesse de ton SMARS !

Étape 5 - Pose de la batterie/pile
Maintenant que tu as poser les moteurs tu peux poser à son tour la pile/batterie dans le châssis avec le connecteur 9V.
Conseil: Fait toujours sortir les câbles électrique par leurs sorties respectives afin d'éviter tout emmêlements et un bazar de câble inutile !

Étape 6 - Installations des supports moteur
Tu peut dès à présent placer les supports moteur afin de maintenir tes moteur quand ils seront en fonctionnement.
Conseil: tu devra légèrement plier les supports pour les faire entrés dans leurs encoches respectives et placer les câbles à travers afin de ne pas se retrouver avec un câble trop court !

Étape 7 - Montage des roues
Pour monter les roues rien de plus simple que de les faire glisser dans les encoches imprimer pour les roues menées et les encoches "métallique" des moteurs pour les roues menantes


Étape 8 - Assemblage des chenilles
Pour assembler correctement les chenilles il te faudra prendre un peu de PLA (filament 3D) et de l'installer dans l'encoche des chenilles et ainsi de suite pour les deux chenilles.
Conseil: Laisse un morceau de chenille sans l'attacher au reste car tu va devoir placer la chenille puis la refermer
Il te suffit de placer la carte dans l'emplacement dédié et de pousser légèrement jusqu'à la butée du châssis.
Conseil: rien ne sert de forcer tu risque de casser soit ta carte soit ton châssis et ce n'est pas le résultat attendue !

Étape 9 - Ajouter la carte arduino avec le shield
Il te suffit de placer la carte dans l'emplacement dédié et de pousser légèrement jusqu'à la butée du châssis.
Conseil: rien ne sert de forcer tu risque de casser soit ta carte soit ton châssis et ce n'est pas le résultat attendue !


Éléments pédagogiques
Sources et ressources
utilisation du site thingiverse pour les modèles 3D
inspiré du site "instructables circuit"
https://www.instructables.com/SMARS-Robot-Arduino-Smart-Robot-Tank-Bluetooth/
https://www.instructables.com/Upgrade-Motor-Shield-for-SMARS-Robot-Arduino-Uploa/
https://www.instructables.com/Program-Your-Arduino-With-an-Android-Device-Over-B/
Dernière modification 5/05/2022 par user:Samy DHL.
Draft